The platform for data collection is a 5 m long aluminum boat with 0.5 m draft. The basic sensor platform consists of:
- A GNSS system with three antennas.
- Real-time kinematic positioning (RTK) capabilities.
- A fibre optic gyro IMU system.
- Four single-channel high-performance vision sensors.
- Two three-channel high-performance vision sensors.
- A 360° documentation camera system.
- Three high-performance laser range scanners.
- A conventional marine 360° spinning radar sensor.
- A weather and barometric pressure sensor.
- An automatic identification system (AIS) receiver.
All sensors are extrinsically calibrated into a joint reference frame, where the GNSS sensor and the IMU jointly provides ground truth positioning.
| Symbol | Type | Qty. | Sensor |
| IMU | 1 | KVH P-1775 | |
| GNSS | 1 (3 ant.) | Anavs MSRTK | |
| Monochrome camera | 4 | Flir ORX-10G-71S7M-C EO 16mm f/4 1″ HPr lens (43.2°) | |
| RGB camera | 2 | Flir ORX-10G-71S7C-C EO 16mm f/4 1″ HPr lens (43.2°) | |
| 360° documentation camera | 2 (8 cam.) | Axis F44 | |
| Lidar | 1 | Ouster OS1 | |
| Lidar | 2 | Ouster OS2 | |
| Marine radar (X-band) | 1 | Simrad Halo 20+ | |
| Wind sensor | 1 | Wind Observer 65 | |
| Radio (AIS & VHF) | 1 | RTL-SDR |
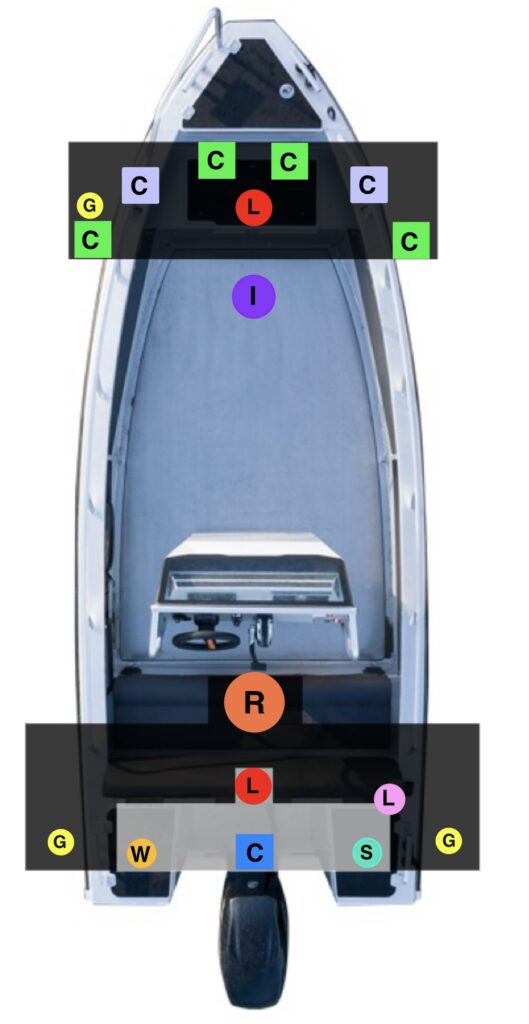
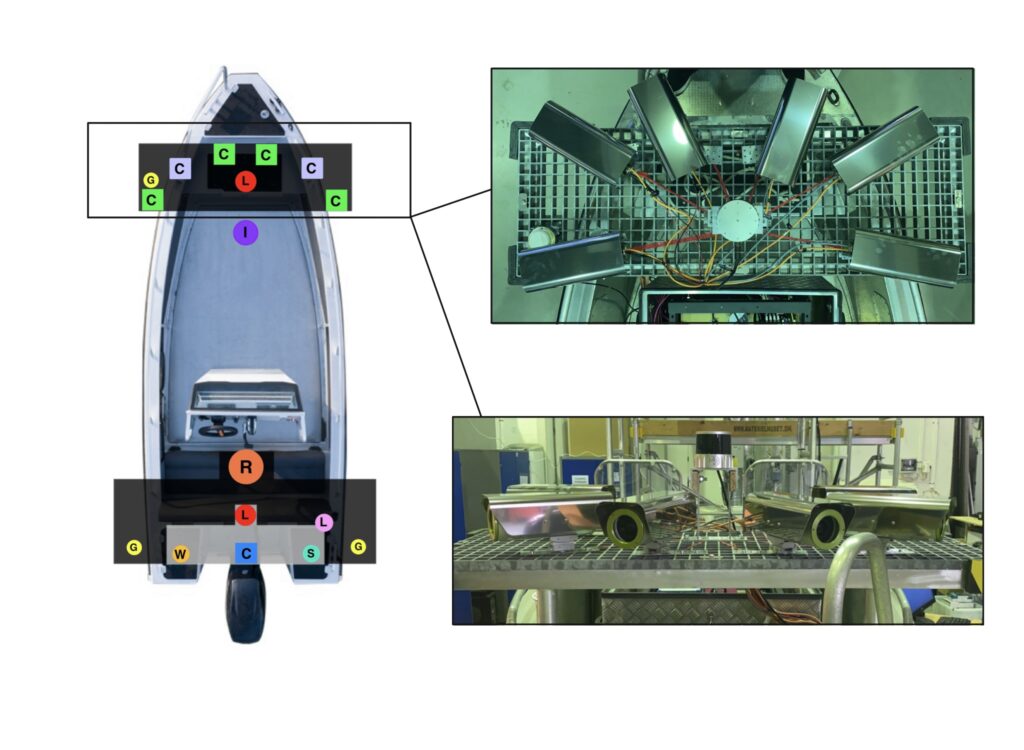
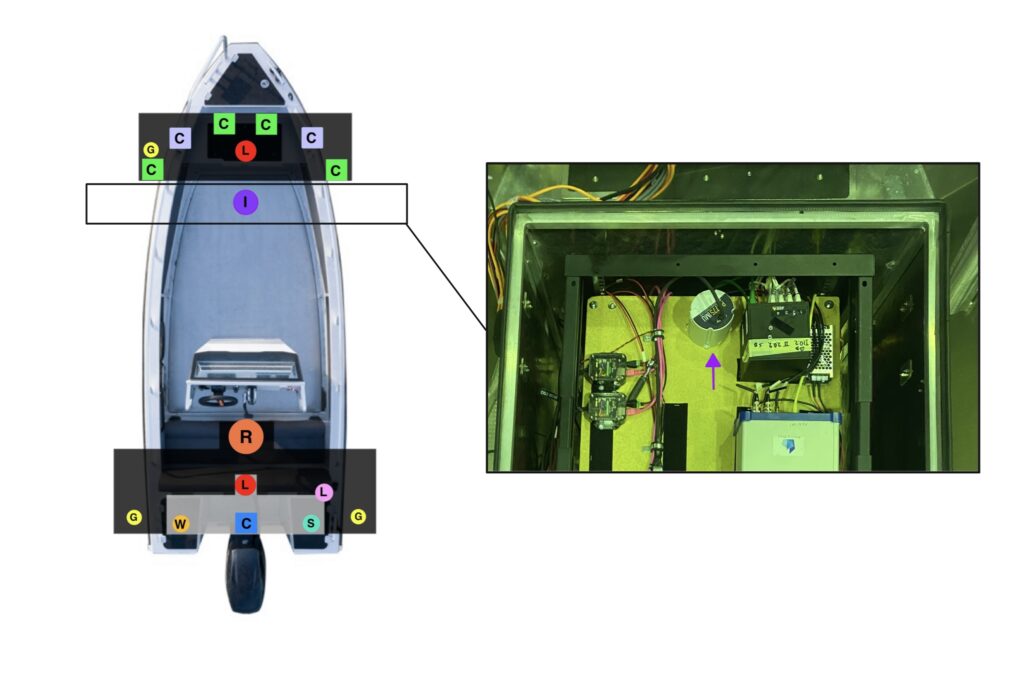
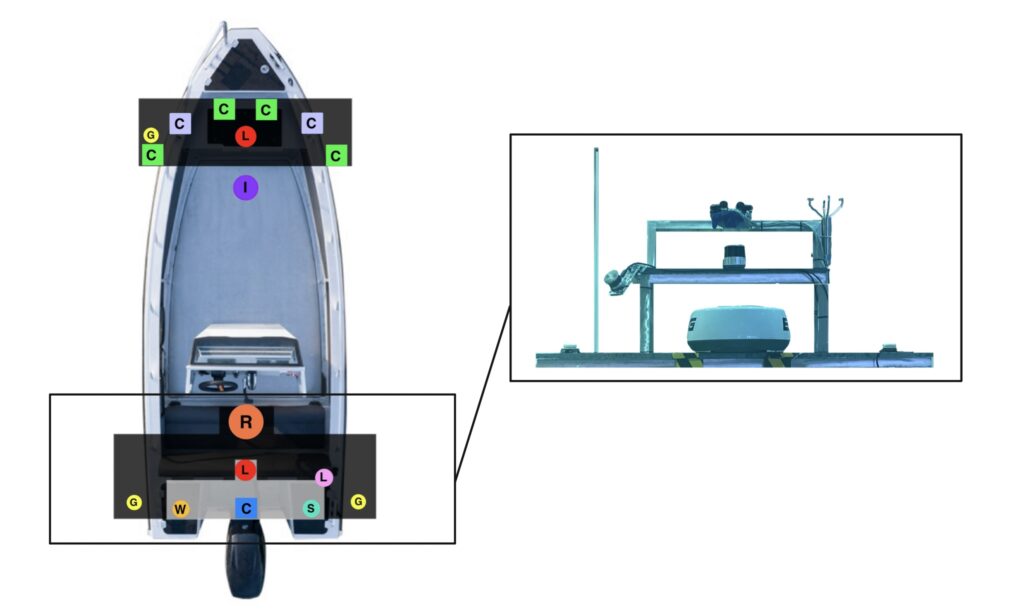
Sensor positions: Pictures from the boat
An overview of the sensor platform. Each dot in the image below correspond to a sensor. All sensors are calibrated into the same coordinate frame.
On-board logging equipment
The logging equipment consists of two data center servers, each equipped with:
- Two AMD EPYC 7352 CPUs (four in total).
- 128 GB memory.
- Four 16 TB Seagate Exos SATA disk drives.
- One 15.36 Micron 9300 NVMe U.2 SSD (3.5 GB/s write).
- One 2 TB Samsung 980 PRO NVMe M.2 SSD (5.1 GB/s write).
- One Nvidia GeForce RTX 2080.
- One Nvidia Quadro RTX 4000.
The cameras and lidars are connected on dedicated 10 GbE network interfaces. The IMU is connected via RS-485 through a dedicated computational unit. All computational nodes run Linux kernel 5.x with PREEMPT_RT activated. The system is connected to the Internet using a 4G link. All computational nodes are time synchronized using PTP through a common global clock synced through GPS, except for the Axis system which is synchronised using local NTP.